澎湃新闻编辑 秦盛(01:16)
特斯拉发布了第二代人形机器人Optimus的最新进展。5月5日,点冷机Tesla Optimus官方账号在社交媒体X上发布了一段Optimus机器人在特斯拉工厂中“打工”的90秒演示视频,并配文说,“最近正在努力变得有用!”

视频中,Optimus正在产线上分拣电芯。视频显示,Optimus的端到端神经网络经过训练,能够对特斯拉工厂的电池单元进行准确分装;Optimus在机器人的FSD计算机上实时运行,仅依靠2D摄像头、手部触觉和力传感器;Optimus利用它的腿保持平衡,同时,依靠神经网络驱动着整个上半身。
视频也从Optimus的角度展示了其工作过程,并介绍称,分拣操作中需要非常精确的动作,且容错率很低,Optimus的神经网络可以自动定位下一个空闲槽位。此外,Optimus还能自主地从故障中恢复。
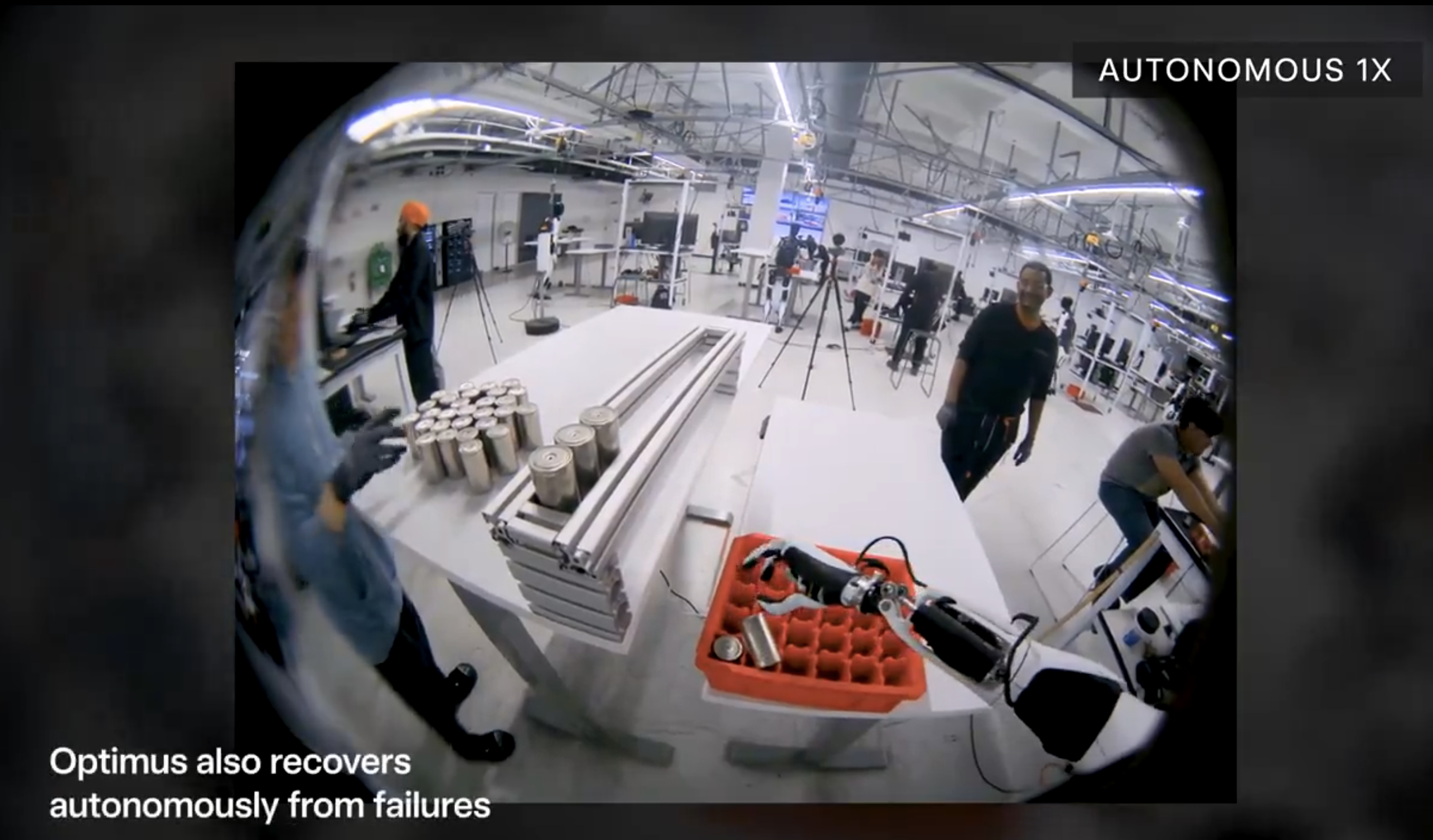
视频还展示了操作人员戴着VR眼镜和手套,通过远程操作的方式来采集数据。

此外,视频展示了Optimus在特斯拉办公室中行走的视频,并介绍称,Optimus 现在不仅走得更快,走的距离也越来越远了。

值得注意的是,特斯拉CEO埃隆·马斯克还在X上透露,Optimus的手部将在今年晚些时候达到22个自由度(可独立活动的关节数量)。
人类手部的自由度为22个(含手腕)。据特斯拉此前发布的信息,Optimus手部拥有11个自由度,而许多竞品的自由度仅有6-7个。Optimus的22个自由度意味着其仿生程度将更进一步。
随后,Optimus项目负责人Milan Kovac转发Tesla Optimus的视频,并发文介绍了Optimus的具体进展。
他表示,在过去的几个月里,特斯拉制造了更多的机器人,并从它们那里收集人工智能数据。目前该团队已经训练并部署了一个神经网络,让Optimus可以开始执行一些有用的任务,例如拾取从传送带上传递下来的电芯,并将它们精确地放入托盘中。
这个神经网络完全以端对端的方式运行,这意味着,它仅使用来自机器人二维摄像头的视频,以及机载的本体传感器,就能直接生成关节控制序列。它完全在机器人的嵌入式FSD计算机上运行,由机载电池供电。
Kovac说,Optimus虽然还不够完美,速度也还有点慢,但成功率越来越高,失败的频率也越来越低了。团队还在训练Optimus从失败案例中恢复,已经出现了自主的修正行为。
Kovac还强调说,目前特斯拉正努力让Optimus移动得更快,并应对更复杂的地形,但是所有这一切工作都不会牺牲它“类人”的本质。他透露,即将有更多更新发布。

负责特斯拉机器人人工智能的工程师Julian Ibarz也发文表示,特斯拉提高了整个Optimus队伍学习行为的可靠性,并决定在工厂引入一些机器人来执行一项真正有用的任务:对电池进行分类。视频展示的自主行为可以持续运行几个小时,直到机器人需要充电。
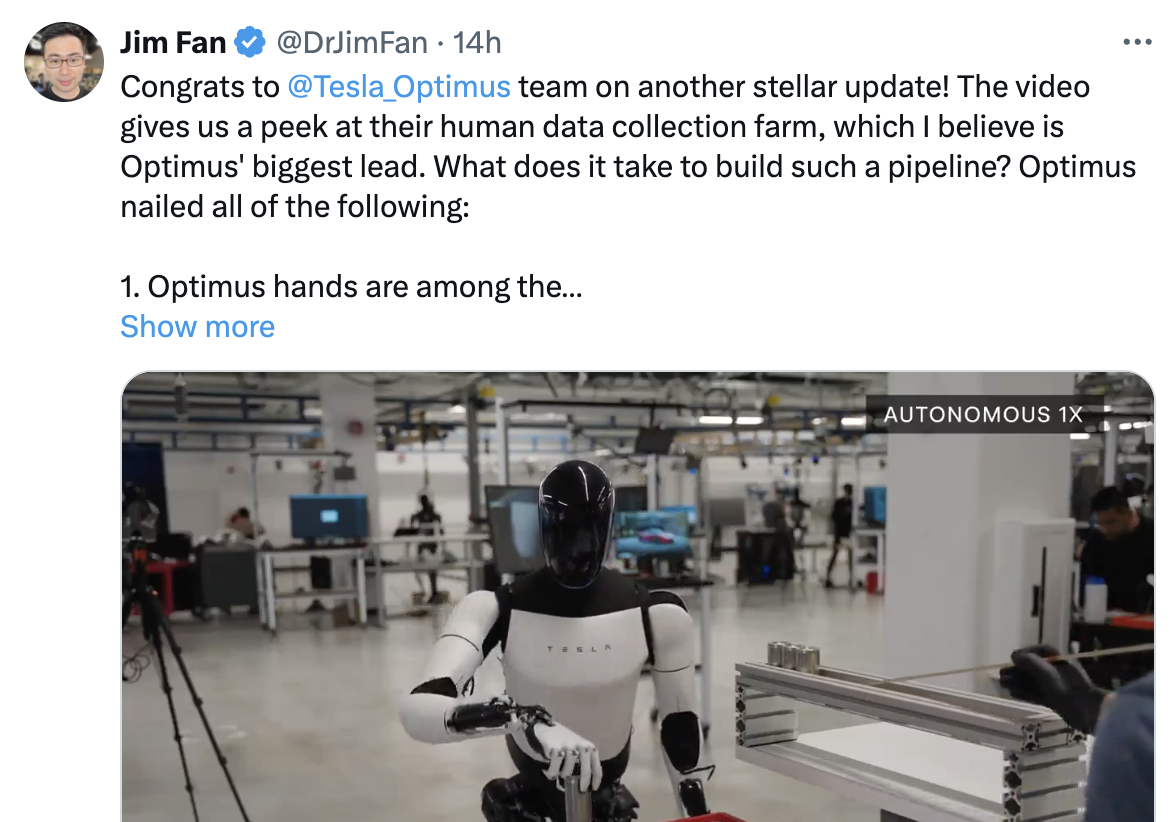
英伟达高级科学家、通用具身智能体研究项目负责人Jim Fan也发文夸赞Optimus的最新进展。他表示,Optimus团队发布了一个重要更新,该视频让我们了解到了他们的“人类数据收集农场”,在我看来,这正是Optimus最大的领先优势。
Optimus机器人原型最先于2022年10月1日的特斯拉第二届人工智能日上亮相。马斯克此前多次强调,Optimus机器人项目将比汽车业务和FSD更有价值。



