引 言
传感器是现行研究的压铸机实时检测与控制系统的关键部件,除尘烟雾收集罩系统利用传感器对压铸机的各重要电控参数 (如:合型力、油压、压射速度、模具温度等)进行检测,并进行准确控制。这一过程中,各传感器输出信号的质量尤为重要,其优劣程度直接影响压铸机控制系统分析、处理数据的准确性,最终影响压铸件产品质量的优劣。由于大型压铸机生产环境较为恶劣,长期的高温、高压、高粉尘及来自周边器械的电磁干扰等因素的存在,不可避免地会造成传感器软硬故障的发生,有故障的传感器所发出的错误信号,会使整个压铸机控制系统分析、处理和控制功能紊乱,造成系统无法正常运行,带来无法估计的生产安全隐患及严重的后果。因此,对压铸机控制系统中传感器故障诊断方法的研究具有重要的意义。
人工神经网络(神经网络)是传感器故障诊断的方法之一。神经网络是有大量人工神经元相互连接而构成的网络。它以分布的方式存储信息,利用网络拓扑结构和权值分布实现非线性的映射,并利用全局并行处理实现从输入空间到输出空间的非线性信息变换。对于特定问题适当建立神经网络诊断系统,可以从其输入数据(代表故障症状)直接推出输出数据(代表故障原因),从而实现非线性信息变换。层状结构的神经网络输入层、输出层及介于二者之间的隐含层构成。依据用于输入层到输出层之间计算的传递函数不同,提出一种基于径向基函数RBF神经网络的传感器故障诊断策略。
1 RBF神经网络的模型
径向基函数神经网络(RBFNN)是一种新型神经网络,属于多层前馈网络,即前后相连的两层之间神经元相互连接,在各神经元之间没有反馈。RBFNN的三层结构与传统的BP网络结构相同,由输入层、隐含层和输出层构成,其结构见图1。其中,用隐含层和输出层的节点计算的功能节点称计算单元。
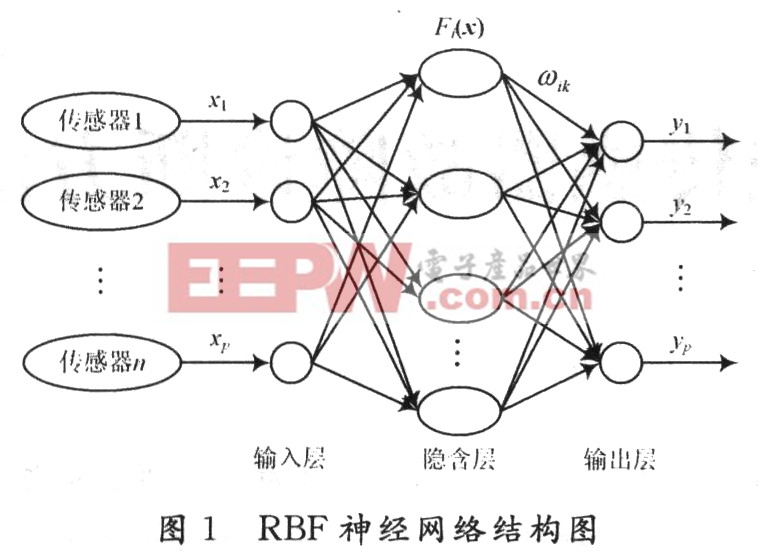
RBF神经网络输入层、隐含层、输出层的节点数分别为n,m,p;设输人层的输入为x=(x1,x2,…,xj,…,xn),实际输出为Y=(y1, y2,…,yk,…,yp)。输入层节点不对输入向量做任何操作,直接传递到隐含层,实现从X→Fi(x)的非线性映射。隐含层节点由非负非线性高斯径向基函数构成,如式(1)所示。


2 算法学习
在此采用模糊K均值聚类算法来确定各基函数的中心及相应的方差,而网络权值的确用局部梯度下降法来修正,算法如下:
2.1 利用模糊K均值聚类算法确定基函数中心ci
(1)随即选择h个样本作为ci(i=1,2,…,h)的初值。其他样本与中心ci欧氏距离远近归人没一类,从而形成h个子类ai(i=1,2,…,h);
si
(2)重新计算各子类中心ci的值,